Un robot seguidor de línea debe cumplir su mayor misión: seguir la línea. Esto objetivo logra gracias a diferentes componentes ensablados en el robot de manera correcta, conjunto con un codigo que permite al robot hacer deciciónes autónomas.
Los componentes basicos:
-
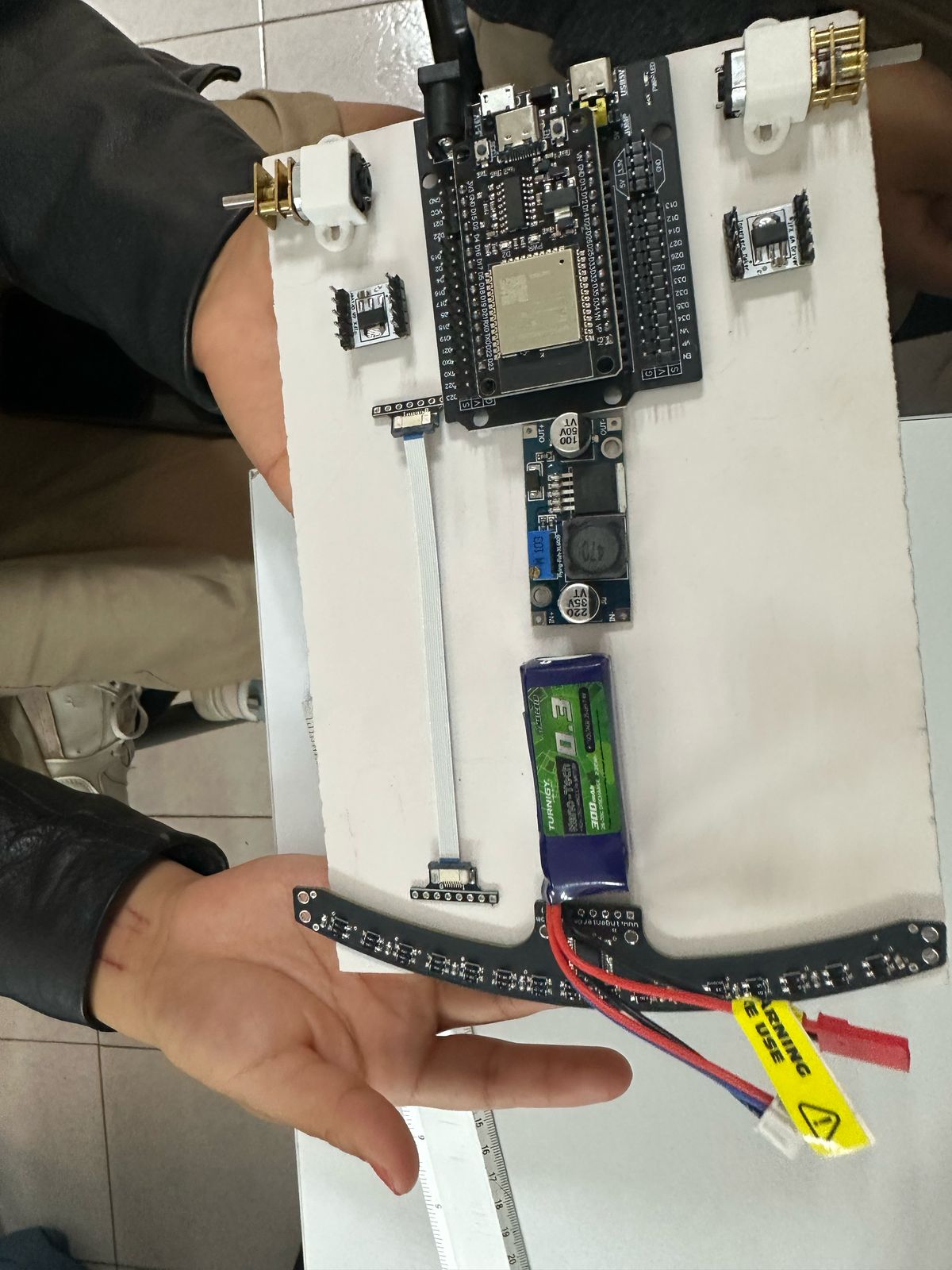
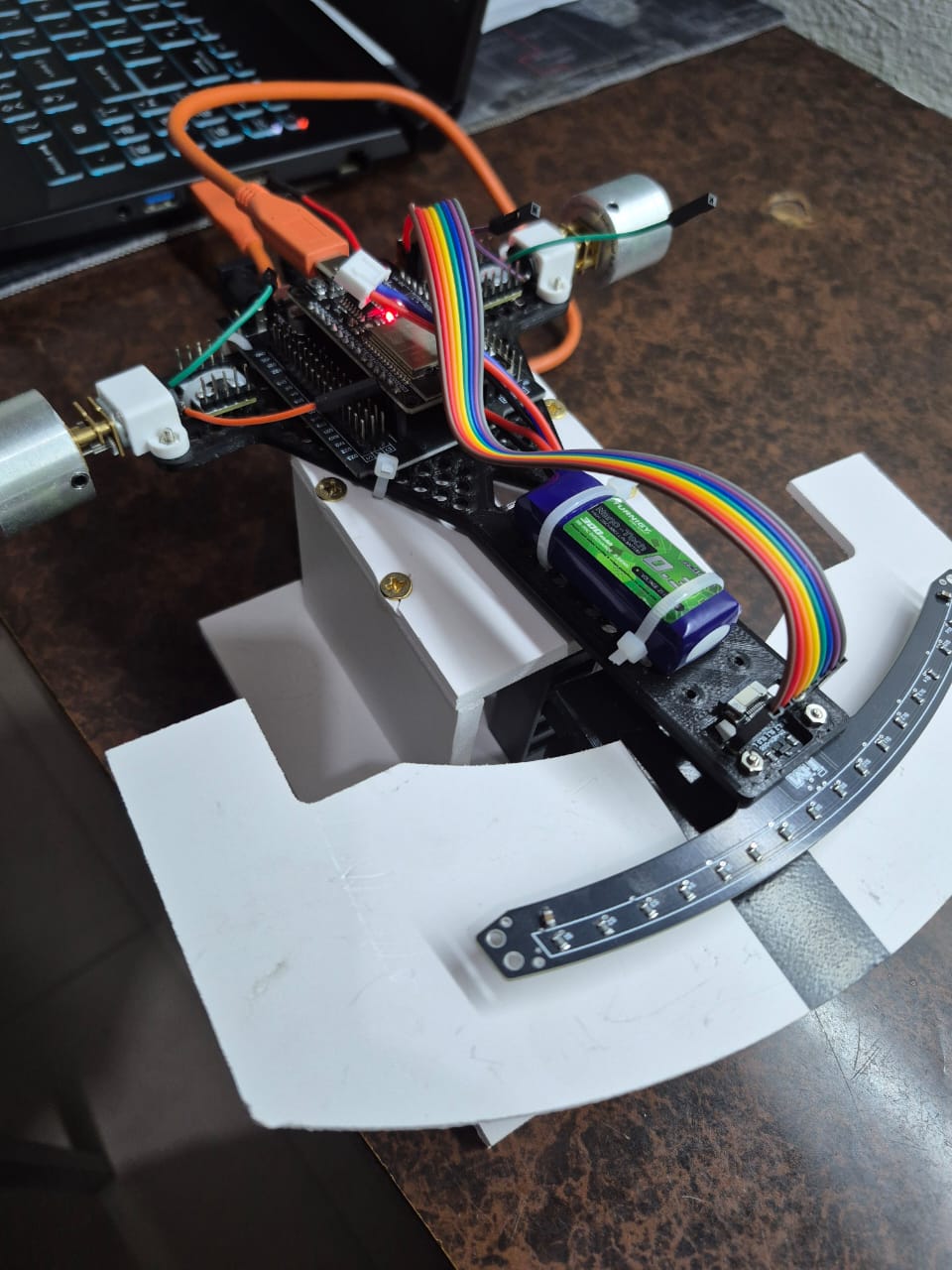
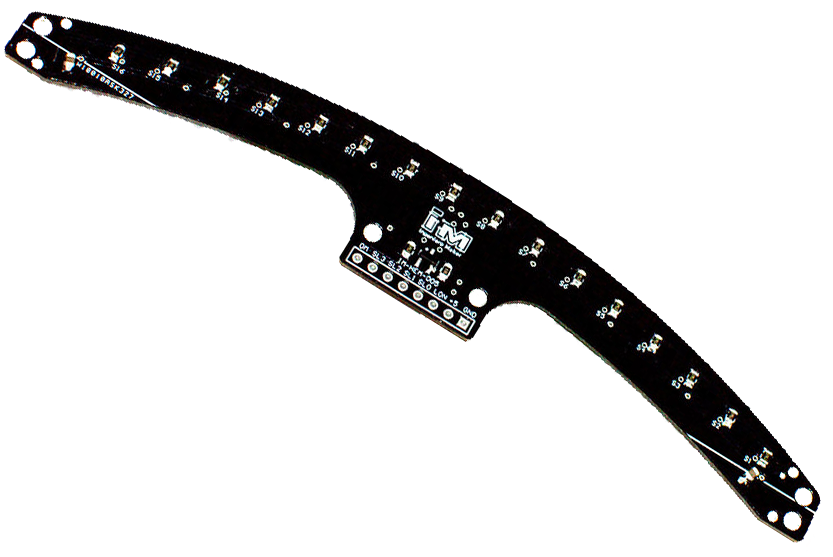
Sensores: Un rastreador detecta la línea a seguir por medio de sensores. Hay muchos tipos de sensores que se pueden usar para este fin; sin embargo, por razones de costos y practicidad, los más comunes son los sensores infrarrojos (IR), cuáles usamos nosotros. También se clacifica por la cantidad de IR. Para Dorothy usamos la barra de 16 sensores.
-
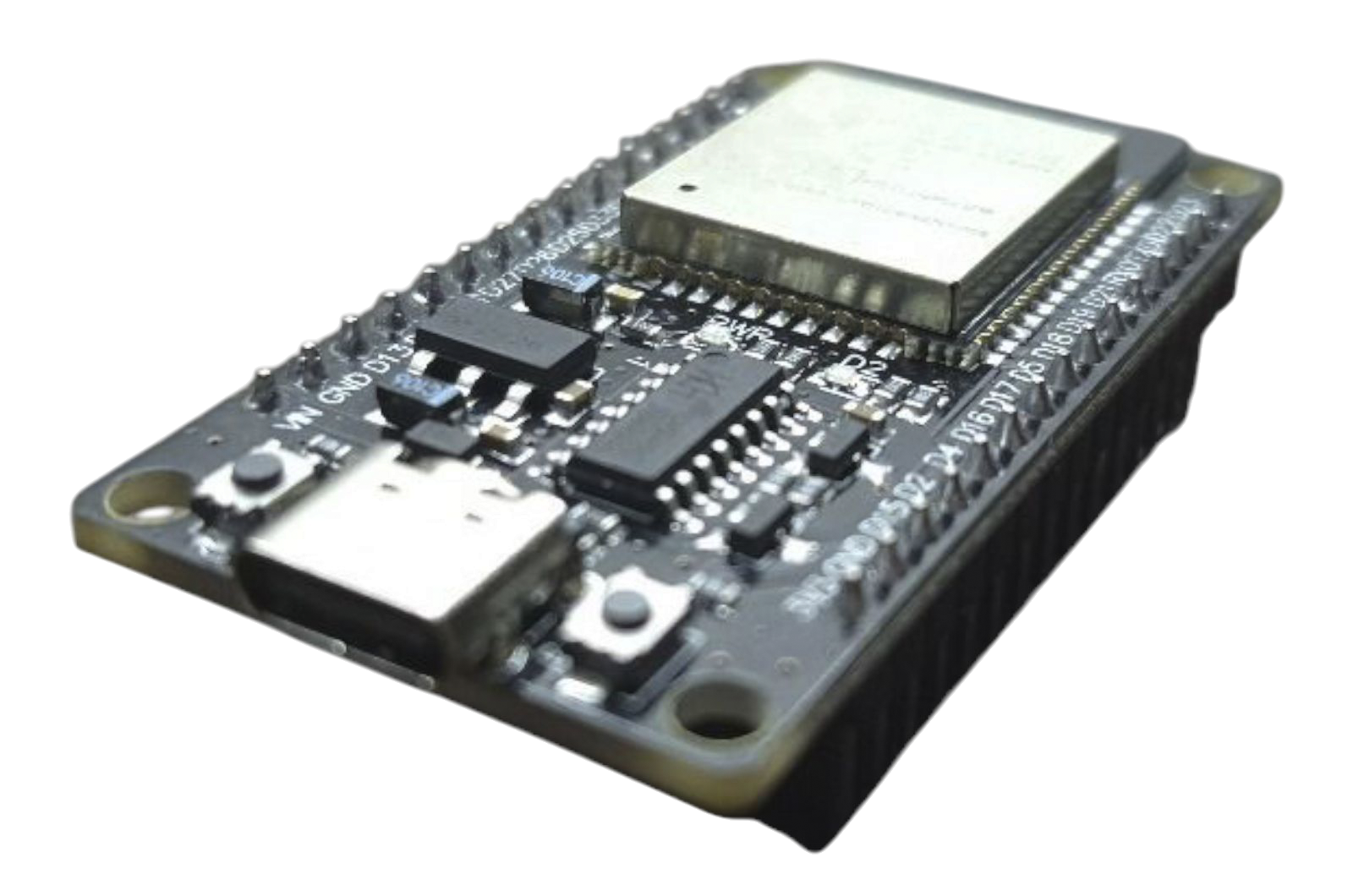
Placa de desarollo: Una herramienta que permite a un usuario la realización de diseño de prototipos tecnológicos. Eligimos el ESP32 DEVKIT V1 a debido que tiene gran cantidad de pines para conectar, tiene conección con Bluetooth y con Wi-fi
-
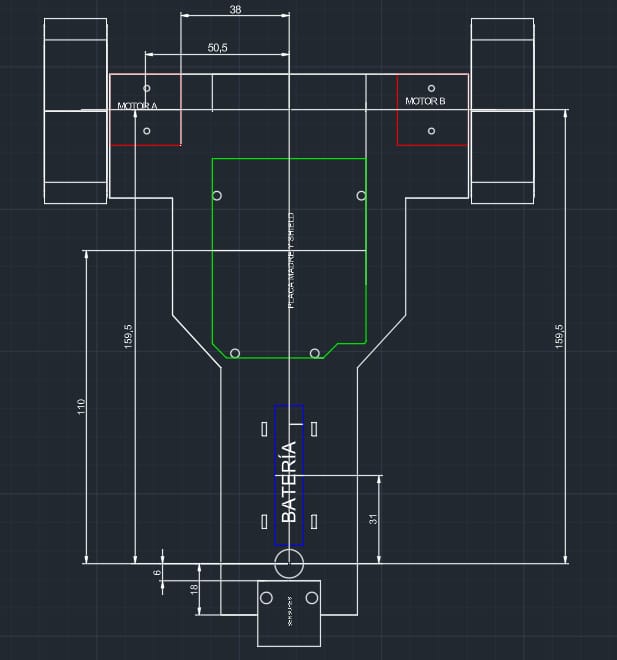
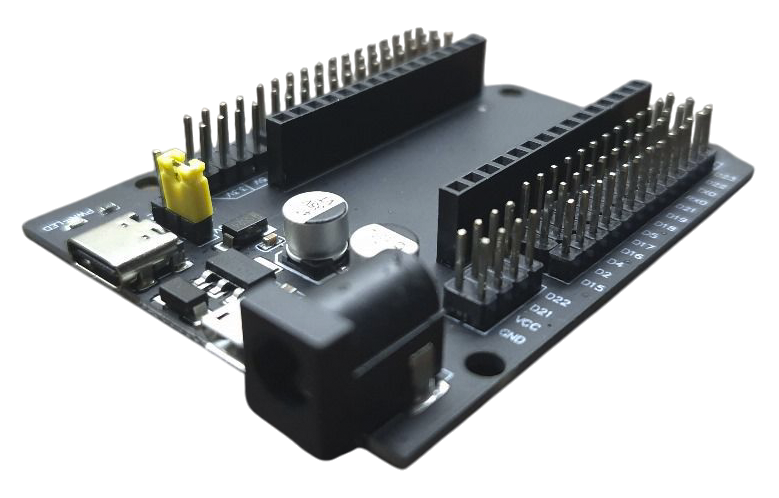
SHIELD: Sirve para conectar más fásil la placa de desarollo. Tenemos Placa de Expansión para ESP32 diseñada especificamente para la placa de desarollo ESP32.
-

Motores: Permiten mover el robot con una velocidad. Nuestros motores son de
-
Motores-reductores: Disminuyen la velocidad de un motor y controlan la fuerza de una máquina, lo que permite girar o reducir velocidad del robot.
-
Llantas: Sirven para que el robot se desplace y gire sobre su propio eje. Las llantas deben ser livianas, tener alta adherencia al suelo y ser lo suficiente pegajosas para que el robot se mantenga estable en la superficie a alta velocidad.
-
Cables: Permiten conectar los diferentes componentes del circuito.
-
Rueda loca: sirve para estabilizar el movimiento de un robot seguidor de línea, y para mantenerlo horizontal. También ayuda a que el robot gire.
-
Chasis: Es la estructura que le permite moverse y que contiene el tren motriz. Todos los componentes estan sobre el chasis.